Ich bin ein begeisterter Robotik Ingenieur mit einer Vorliebe für mobile Roboter und autonome Fahrzeuge. Mit der Kombination aus Wissen und Lernbegierde strebe ich danach, die Grenzen der Automatisierung und Robotik zu verschieben.
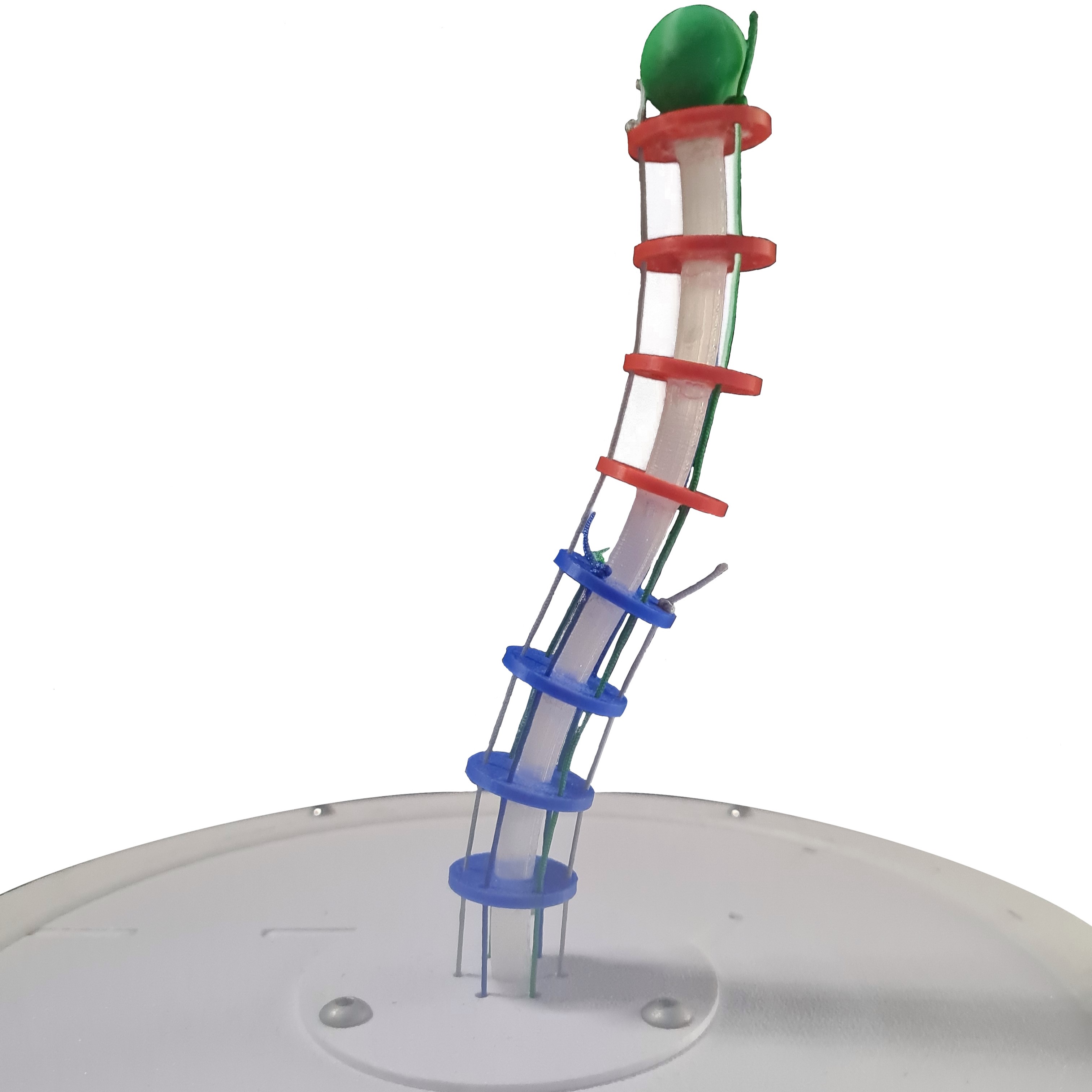
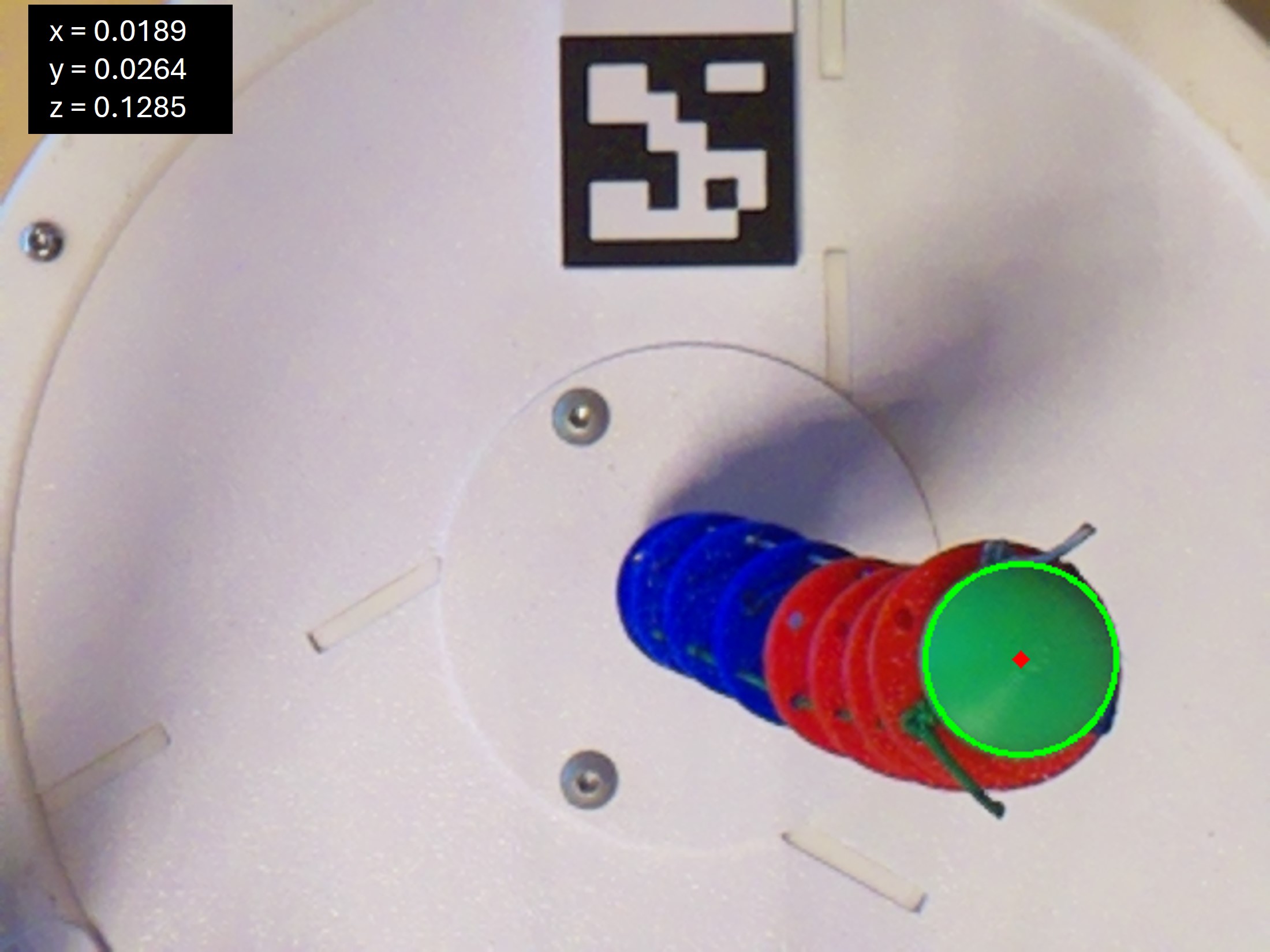
Aufgrund der Nachfrage nach mehr Flexibilität und Sicherheit von Robotiksystemen, konzentriert sich die Forschung in der Robotik zunehmend auf Kontinuumsrobotik und Soft-Robotik. Diese Systeme bieten durch ihre zusätzlichen Freiheitsgrade mehr Flexibilität als traditionelle Industrieroboter, wie z.B. Knickarmroboter. So ist es möglich, eine gewünschte Zielpose mit mehr als einer möglichen Roboterkonfiguration zu erreichen. Kontinuumsroboter verfügen über eine intrinsische Flexibilität und Nachgiebigkeit, die es ermöglicht in komplexen und engen Bereichen zu operieren und sich an dynamische Veränderungen in der Umgebung anzupassen. Diskrete Roboter sind hingegen aufgrund der starren Struktur in ihrer Flexibilität beschränkt. Im Rahmen dieser Arbeit wurden kinematische Modelle nach aktuellem Stand der Technik verwendet, um die Kinematik eines sehnengetriebenen Kontinuumroboters zu berechnen. Der Fokus liegt auf drei Modellen, dem Piecewise Constant Curvature Modell, dem Pseudo Rigid-Body Modell und der Cosserat Rod Theorie. Diese Modelle wurden zur Berechnung der Vorwärtskinematik sowie der inversen Kinematik mithilfe der Levenberg-Marquardt Optimierung herangezogen. Zur Evaluierung der kinematischen Modelle wurde ein Prototyp eines sehnengetriebenen Kontinuumroboters entwickelt. Nach der Implementierung der Modelle wurden verschiedene Experimente durchgeführt, bei denen die Genauigkeit und Effizienz der Modelle ermittelt wurde. Die kinematischen Modelle wurden miteinander verglichen und ein Quervergleich mit Arbeiten nach aktuellem Stand der Technik im Bereich der Kinematik für Kontinuumroboter wurde durchgeführt, um das am besten geeignete Modell für den Prototypen zu ermitteln. Die Ergebnisse haben gezeigt, dass das Piecewise Constant Curvature Modell ein gutes Gleichgewicht zwischen Genauigkeit und Rechenaufwand bietet, während bei den anderen Modellen mindestens einer der beiden Aspekte erheblich schlechter ausfällt.