I am an enthusiastic robotics engineer with a love for mobile robots and autonomous vehicles. With the combination of knowledge and eager to learn, I strive to push the boundaries of automation and robotics.
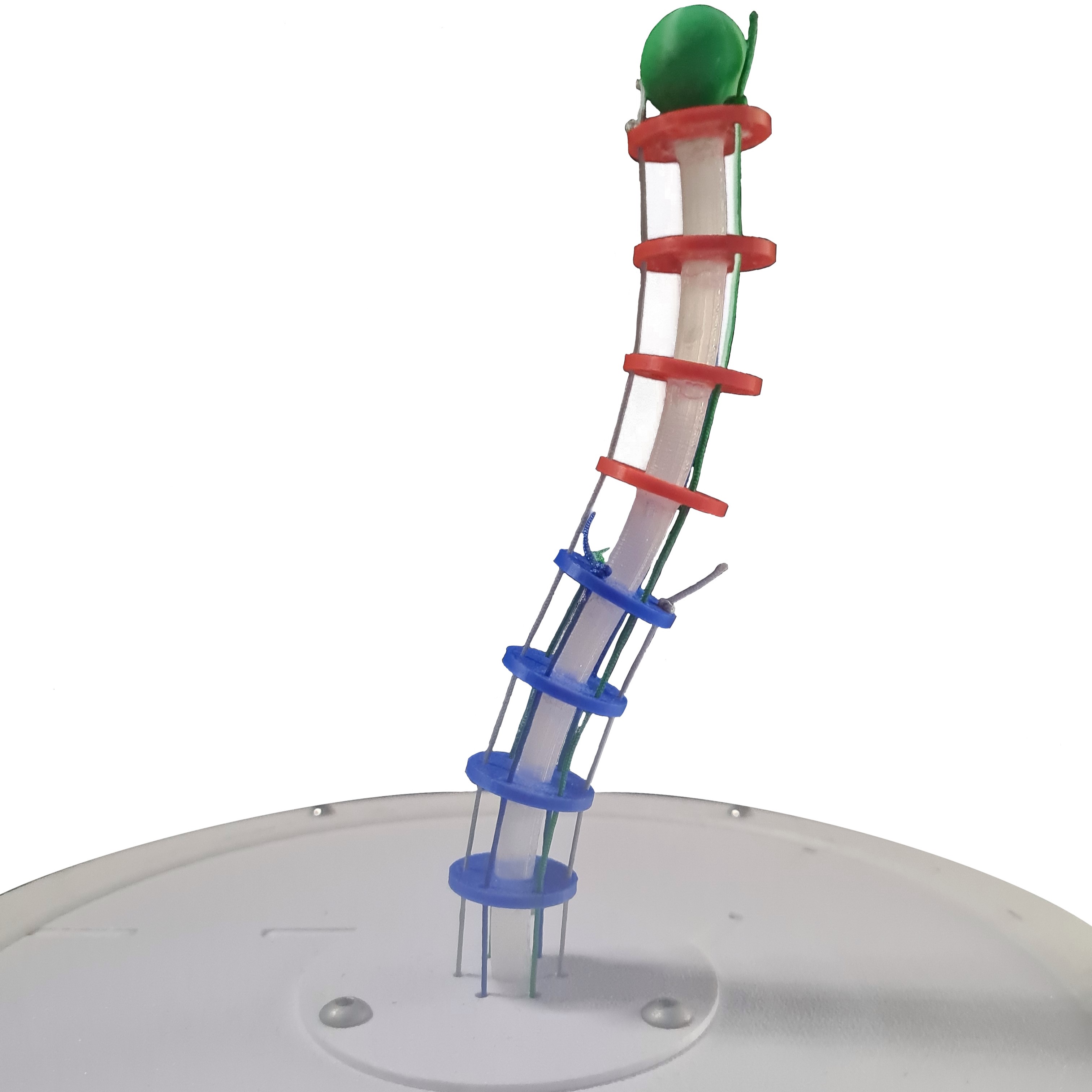
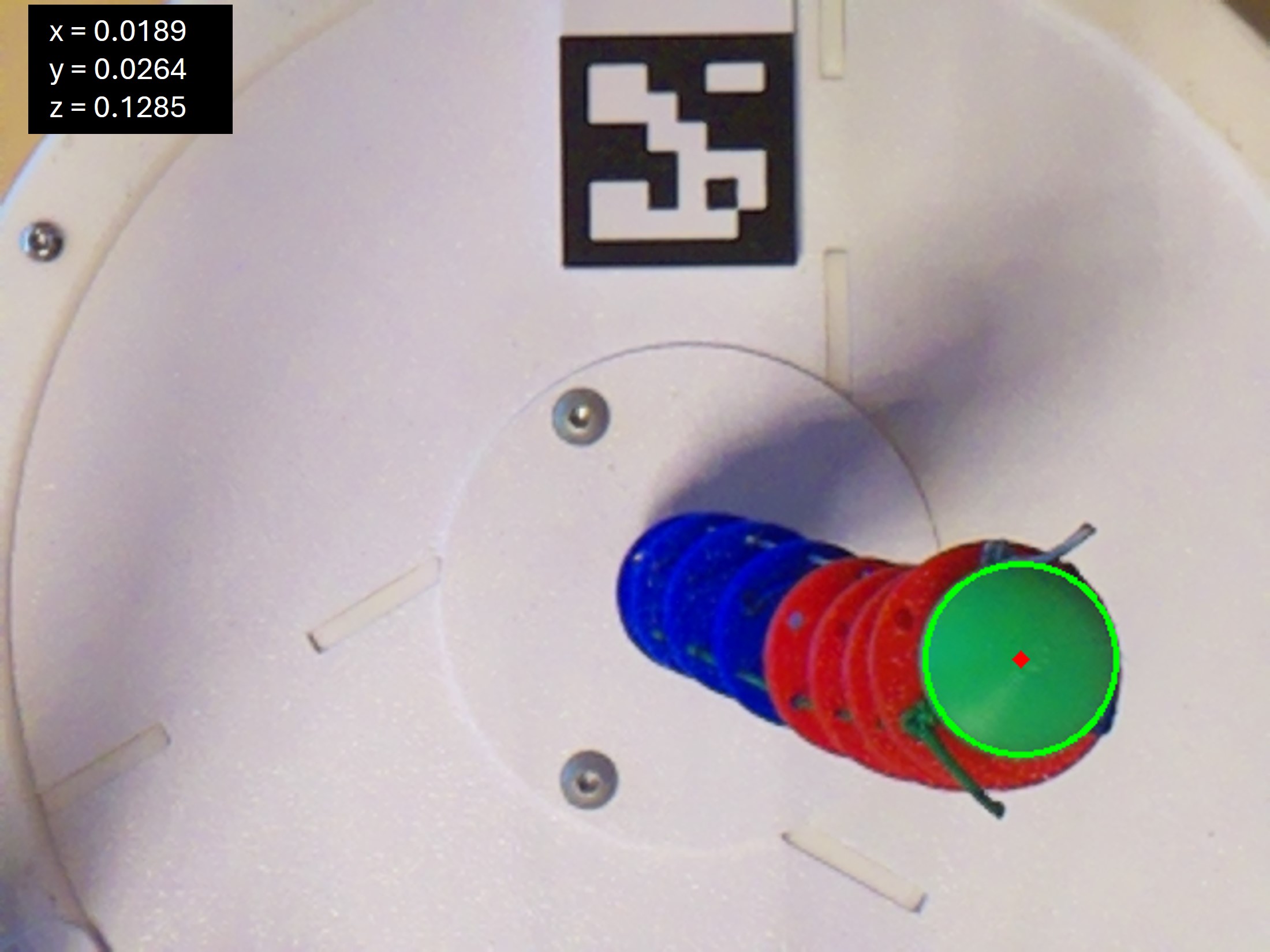
Research in robotics has been increasingly focusing on continuum robotics and soft robotics, due to the demand for more flexible and safer robotic systems. These systems provide more flexibility due to more DOF than traditional robots like articulated arms. This makes it possible to reach a desired target pose with more than one possible robot configuration. Continuum robots possess intrinsic flexibility and compliance, which makes it possible to operate in complex and confined areas as well as adapt to dynamic changes in the environment. Discrete robots are more limited in their flexibility due to the non-deformable structure. In the course of this work, state of the art kinematic models were used to compute the kinematics of a tendon-driven continuum robot. The focus of this work lies on three models, the piecewise constant curvature model, the pseudo rigid-body model and the Cosserat rod theory. These models were used to compute the forward kinematics as well as the inverse kinematics using Levenberg-Marquardt optimization. For the evaluation of the kinematic models, a prototype of a tendon-driven continuum robot was developed. After the implementation of the models, various experiments were carried out where the accuracy and the efficiency of the models was determined. The kinematic models were compared with each other and a cross comparison with state of the art works was given in order to determine the best fitting model for the continuum robot prototype. The results have shown that the piecewise constant curvature model gives a good balance between accuracy and computational demands, while the other models lack in at least one of the two aspects.