Ich bin ein begeisterter Robotik Ingenieur mit einer Vorliebe für mobile Roboter und autonome Fahrzeuge. Mit der Kombination aus Wissen und Lernbegierde strebe ich danach, die Grenzen der Automatisierung und Robotik zu verschieben.
Manchmal ist die Hand eines Menschen so stark geschädigt, dass sie nicht mehr erhalten werden kann. Es ist eine Amputation notwendig, um den Schaden am Körper nicht zu vergrößern. Die aktuelle Technologie bietet Prothesen, welche als Ersatz für eine amputierte Hand dienen und den Benutzer in seinem täglichen Leben unterstützen können. Um jedoch eine menschliche Hand zu ersetzen, muss die Prothese mehrere Kriterien erfüllen. Eine bionische Handprothese muss funktional, komfortabel, leicht und kostengünstig sein. Kommerzielle bionische Hände werden heutzutage aus starren Materialien hergestellt wie Kohlefaser, um Gewicht zu sparen – aber diese Materialien können teuer sein. Aufgrund der Steueralgorithmen, die Signale des menschlichen Körpers erfassen, und der möglichen Griffkraft einer solchen Hand besteht die Gefahr, dass ein Objekt beim Greifen beschädigt wird. Die Soft-Robotik Forschung zu bionischen Handprothesen konzentriert sich darauf, dieses Problem zu lösen, indem softe Materialien wie Silikon für die Aktuatoren verwendet werden.
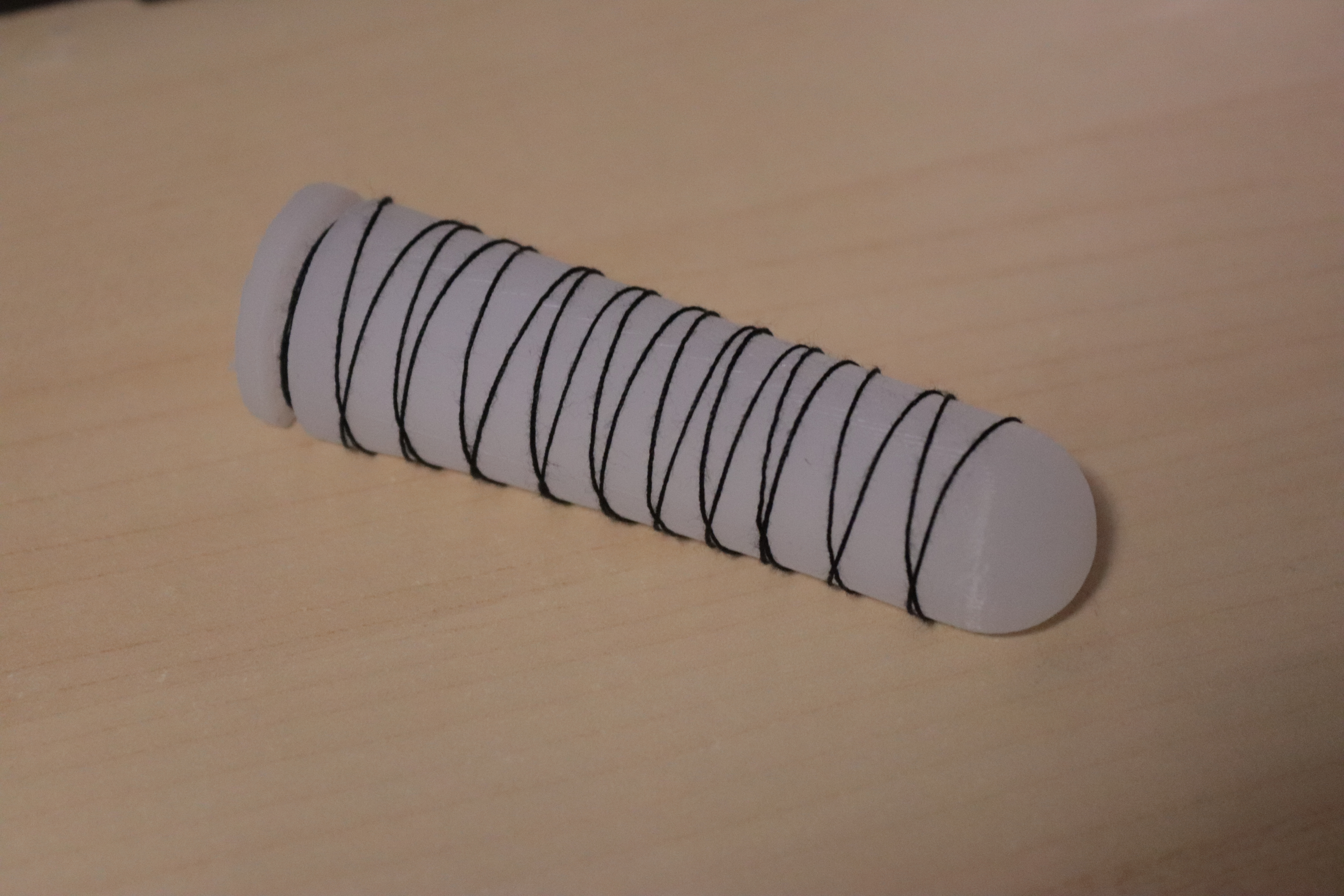
In dieser Bachelorarbeit wird die Entwicklung und Fertigung einer pneumatisch betriebenen bionischen Hand vorgestellt. Dieser Prototyp besteht aus soften Materialien und PneuFlex Soft-Aktuatoren werden als Finger verwendet. In einer Testreihe wurde das Konzept auf Funktionalität geprüft. Zusätzlich werden alternative Konzepte aufgezeigt und bewertet, die es ermöglichen, die Aktuatoren nicht nur in der Ruheposition, sondern auch in anderen gewünschten Positionen zu halten.