I am an enthusiastic robotics engineer with a love for mobile robots and autonomous vehicles. With the combination of knowledge and eager to learn, I strive to push the boundaries of automation and robotics.
Sometimes a human’s hand is damaged to an extent where it can no longer be preserved, an amputation is then necessary in order not to increase the damage to the body. Current technology offers prostheses that serve as a replacement for an amputated hand and can support the user in his daily life. However, to replace a human hand, the prosthetic device needs to fulfil multiple criteria. A bionic hand prosthesis must be functional, comfortable, light and affordable. Commercial bionic hands nowadays are made from rigid materials such as carbon-fibre to save weight – but these materials can be expensive. Due to the control algorithms which acquire signals from the human body and the possible grasping strength of such a hand, there is a risk of damaging an object while grasping it. Soft robotics research on bionic hand prostheses focuses on solving this problem by using soft materials like silicone for the actuators.
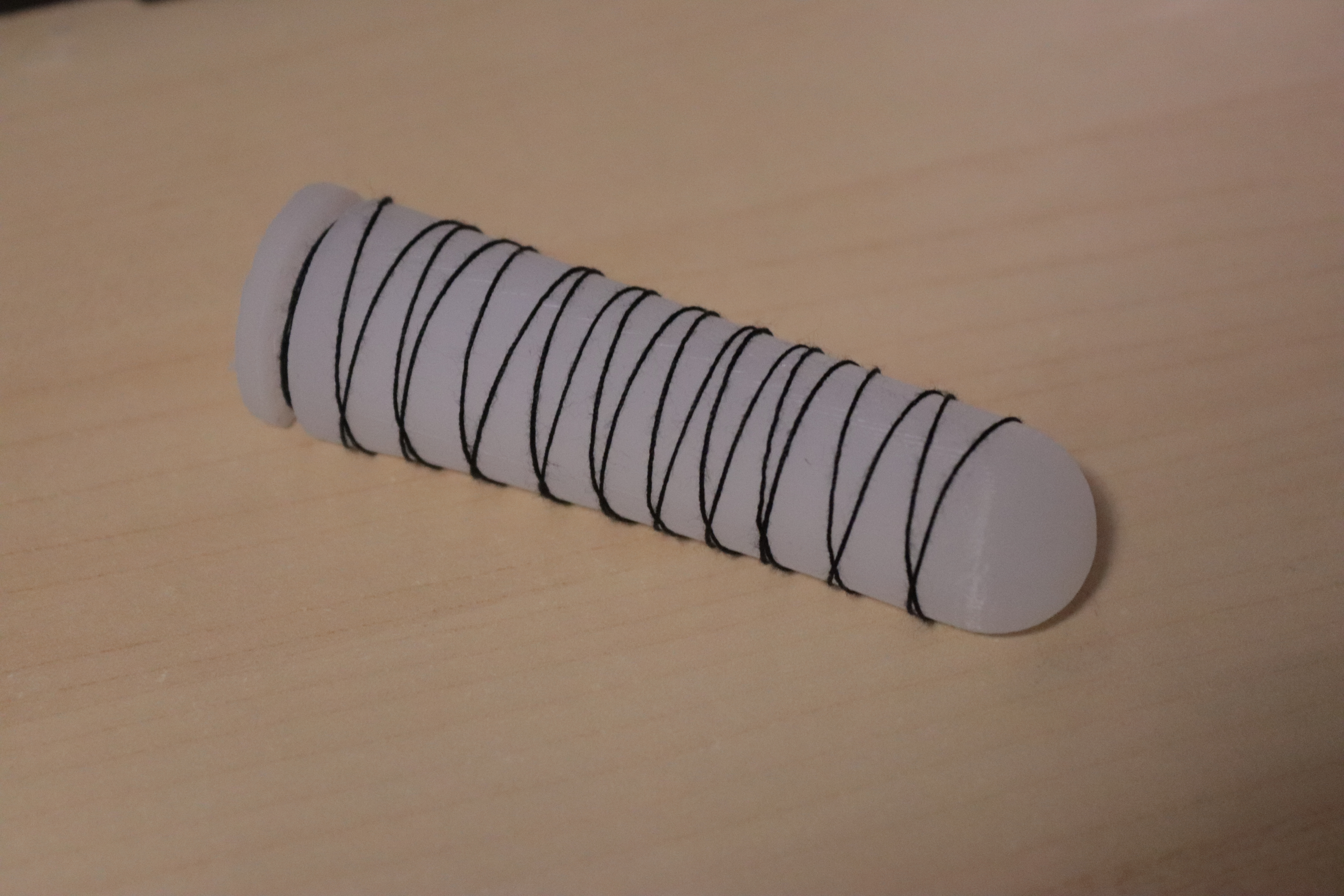
In this bachelor’s thesis the development and manufacturing of a pneumatically operated bionic hand is presented. This prototype is made of soft materials and PneuFlex soft actuators are used as fingers. In a series of tests, the concept was checked for functionality. In addition, alternative concepts are suggested and evaluated, which would make it possible to hold the actuators in desired positions other than the neutral position.